步態研究參考:
http://blog.kevinbrianchen.com/2014/08/quadruped-robot-walking.html
本次是把這隻蜘蛛再重新設計一次,主要目的是提升robot腳的結實度與轉動的自由度。
先把Sketchup設計的美圖放上,過幾天會轉成STL再印出來。
美圖欣賞:

《整體圖》

《多個可愛的結構》

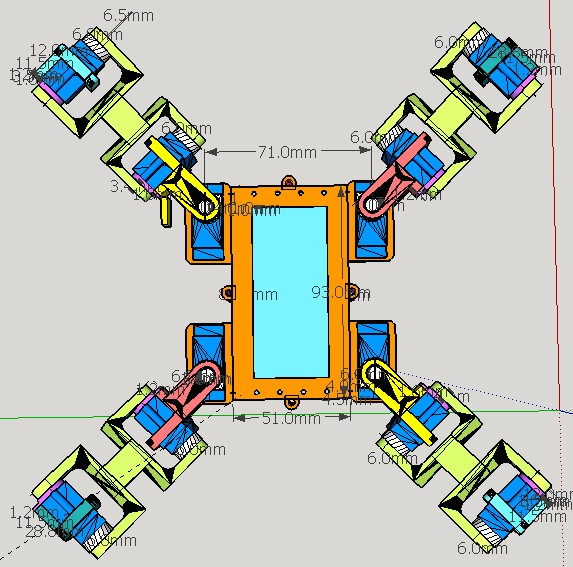
《正視圖》
《俯視圖》

《仰視圖》

《身體近照》
改善的詳細解說:

《重新設計》

《關節圓潤化》

《把軸距加長,總長不變》

《轉軸增加強度》

《增強螺絲鎖付結構》

《腳尖圓弧設計,適應各角度》
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
欣賞3D美圖之後,把結構印出來組裝試試尺寸是否正確
經過可愛的3D打印機努力了2個小時,新的結構出現了!!!
3D打印機真是神器啊!!
自從去年DIY這台 Prusa i3,讓我可以把想法實現出來,太美妙了!

《在列印平台上-1》

《在列印平台上-2》
拆下來後,把玩一下,心中一直碎碎唸~~~
太有趣,太美妙,好感動!!!!

《拆下來的美圖》
雖然是老機器,不過印出來還真漂亮!!!

《近照》

《組合圖》
試組後,尺寸都正常,不過~ 事實總是沒這麼順利啦 ~~
螺絲孔的size弄錯,1.6mm用了2mm。

《新腳 vs 舊腳 - 1》

《新腳 vs 舊腳 - 2》
都順利組合完成,新腳看起來比較圓潤,有“產品”的效果了。
接下來,準備把列印的顏色分好,再重新印出來!
很多上市的商品都有把邊緣的銳角修飾R角,那是如何做到的?
參考下篇分享。。。
感謝分享
回覆刪除